Simulation de Trajectoires d'Avions avec Détection de Collision
Trois avions sont simulés dans un espace bidimensionnel avec des vitesses et directions aléatoires.
Le système détecte et affiche les collisions en fonction d'un seuil défini.
1. Classe Avion
class Avion:
def __init__(self, position, vitesse, direction):
self.position = np.array(position, dtype=float)
self.vitesse = vitesse
self.direction = np.array(direction, dtype=float)
self.trajectoire = [self.position.copy()]
self.actif = True
def deplacement(self):
if self.actif:
self.position = self.position + self.direction * self.vitesse
self.trajectoire.append(self.position.copy())
2. Simulation
NB_ITER = 100
TAILLE = 50
SEUIL_COLLISION = 5
avions = [Avion(
position=[random.uniform(10, TAILLE-10), random.uniform(10, TAILLE-10)],
vitesse=random.uniform(1, 3),
direction=[random.uniform(-1, 1), random.uniform(-1, 1)]
) for _ in range(3)]
for i in range(NB_ITER):
for avion in avions:
avion.deplacement()
d12 = np.linalg.norm(avions[0].position - avions[1].position)
d23 = np.linalg.norm(avions[1].position - avions[2].position)
d13 = np.linalg.norm(avions[0].position - avions[2].position)
if avions[0].actif and avions[1].actif and d12 < SEUIL_COLLISION:
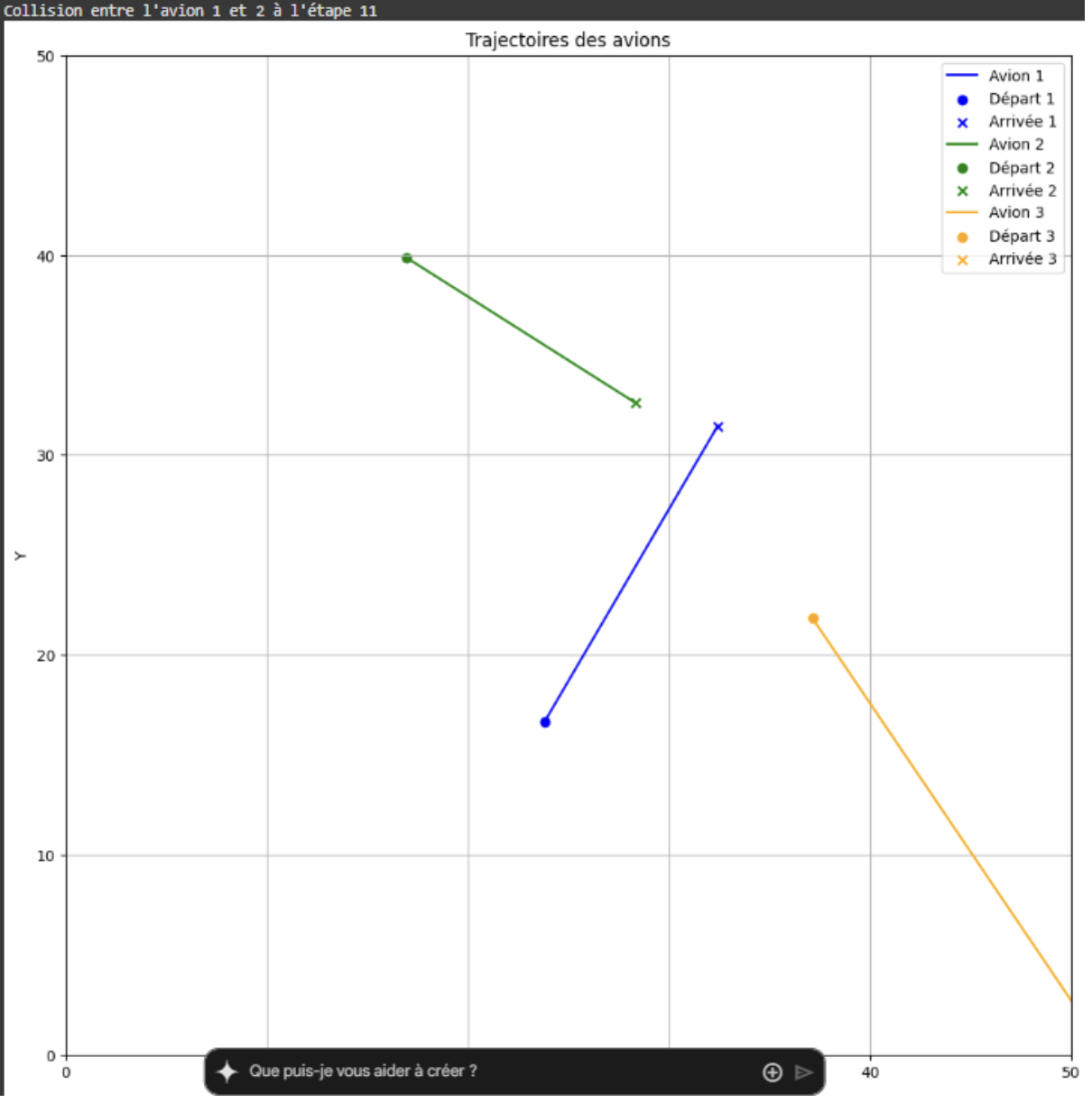
print(f"Collision entre avion 1 et 2 à l'étape {i}")
avions[0].actif = avions[1].actif = False
if avions[1].actif and avions[2].actif and d23 < SEUIL_COLLISION:
print(f"Collision entre avion 2 et 3 à l'étape {i}")
avions[1].actif = avions[2].actif = False
if avions[0].actif and avions[2].actif and d13 < SEUIL_COLLISION:
print(f"Collision entre avion 1 et 3 à l'étape {i}")
avions[0].actif = avions[2].actif = False3. Affichage des Trajectoires
plt.figure(figsize=(12, 12))
couleurs = ['b', 'g', 'orange']
for i, avion in enumerate(avions):
trajectoire = np.array(avion.trajectoire)
plt.plot(trajectoire[:, 0], trajectoire[:, 1], color=couleurs[i], label=f"Avion {i+1}")
plt.scatter(trajectoire[0, 0], trajectoire[0, 1], color=couleurs[i], marker='o', label=f"Départ {i+1}")
plt.scatter(trajectoire[-1, 0], trajectoire[-1, 1], color=couleurs[i], marker='x', label=f"Arrivée {i+1}")
plt.title("Trajectoires des avions")
plt.xlabel("X")
plt.ylabel("Y")
plt.xlim(0, TAILLE)
plt.ylim(0, TAILLE)
plt.legend()
plt.grid(True)
plt.show()Trajectoire des avions avec collision (arrêt de l'avion 1 et 2) :
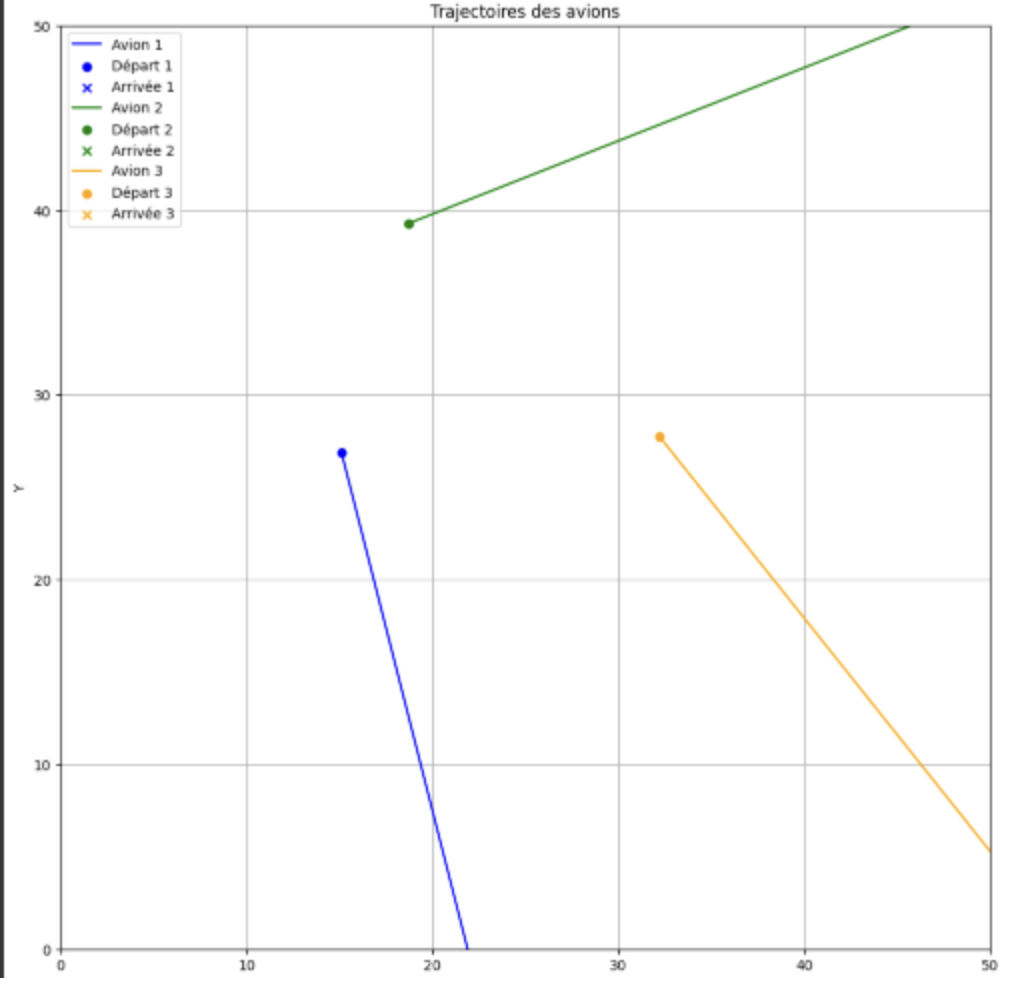
Trajectoire des avions sans collision :
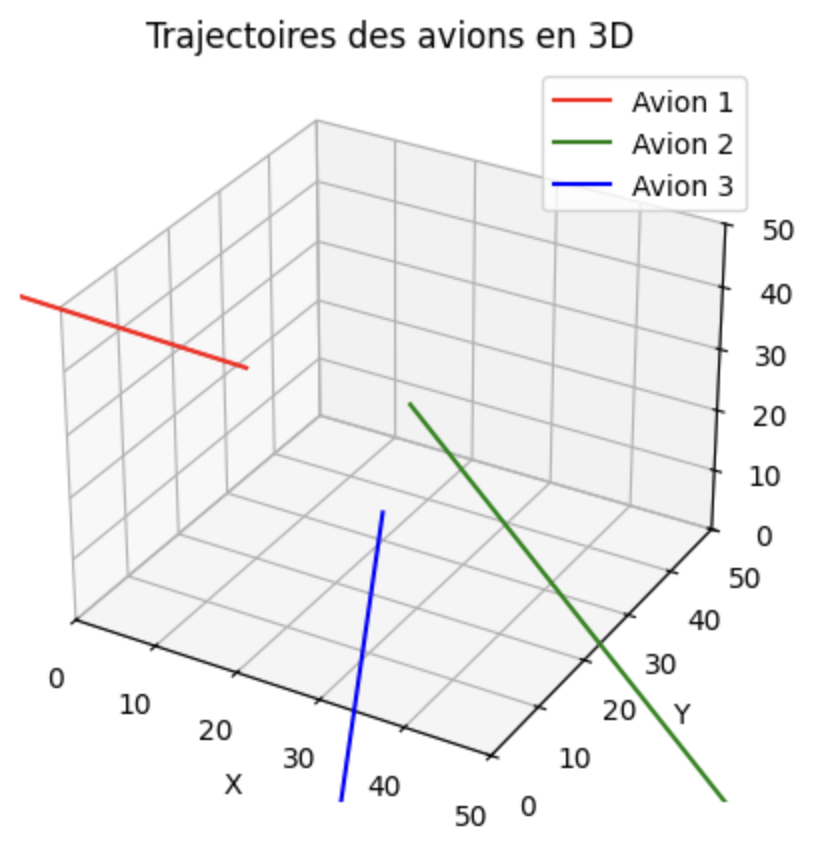
Afin de passer d’un modèle 2D à un modèle 3D,
il faut transformer les matrices de positions et de directions 2D en matrices 3D.
Passage du 2D en 3D
avion1 = Avion(
position=[random.uniform(10, TAILLE-10), random.uniform(10, TAILLE-10), random.uniform(10, TAILLE-10)],
vitesse=random.uniform(1, 3),
direction=[random.uniform(-1, 1), random.uniform(-1, 1), random.uniform(-1, 1)]
)
Trajectoire des avions dans un espace 3D :